About Me
I am a self-driven and innovative robotics researcher, specialized in controls systems and machine learning to enhance human-robot interaction. My journey in robotics began at Istanbul Technical University, where I graduated as valedictorian in Control and Automation Engineering, focusing on robust control systems. Currently, I'm working on a cutting-edge project in human-robot interaction at Robotics and Mechatronics Laboratory of Koç University as master’s student. The project aims to recognize human intention during a co-manipulation task executed with a collaborative robot. My research is fueled by a blend of curiosity and a desire to solve real-world problems, contributing to advancements that might one day transform how we live, work, and interact with technology.
Beyond the lab, I'm a passionate learner and a mentor, keen on sharing my knowledge and experiences with others. My belief in the power of education and innovation drives me to continuously explore new horizons in robotics, aiming to inspire and be inspired by the next generation of scientists and engineers.
When I'm not tangled up in my research, you can find me on the basketball court, diving into a good book, or strategizing over a chessboard – hobbies that, much like my professional pursuits, challenge me to think ahead and keep learning.
Thank you for visiting my site. Feel free to explore my projects, research, and musings on the future of robotics. If you're interested in learning more about my professional journey, you can see my CV (PDF).
Intro

Aenean ornare velit lacus, ac varius enim ullamcorper eu. Proin aliquam facilisis ante interdum congue. Integer mollis, nisl amet convallis, porttitor magna ullamcorper, amet egestas mauris. Ut magna finibus nisi nec lacinia. Nam maximus erat id euismod egestas. By the way, check out my awesome work.
Lorem ipsum dolor sit amet, consectetur adipiscing elit. Duis dapibus rutrum facilisis. Class aptent taciti sociosqu ad litora torquent per conubia nostra, per inceptos himenaeos. Etiam tristique libero eu nibh porttitor fermentum. Nullam venenatis erat id vehicula viverra. Nunc ultrices eros ut ultricies condimentum. Mauris risus lacus, blandit sit amet venenatis non, bibendum vitae dolor. Nunc lorem mauris, fringilla in aliquam at, euismod in lectus. Pellentesque habitant morbi tristique senectus et netus et malesuada fames ac turpis egestas. In non lorem sit amet elit placerat maximus. Pellentesque aliquam maximus risus, vel sed vehicula.
Research Projects
Can a Robot Resolve Conflicts with a Human During Co-Manipulation? (Submitted)
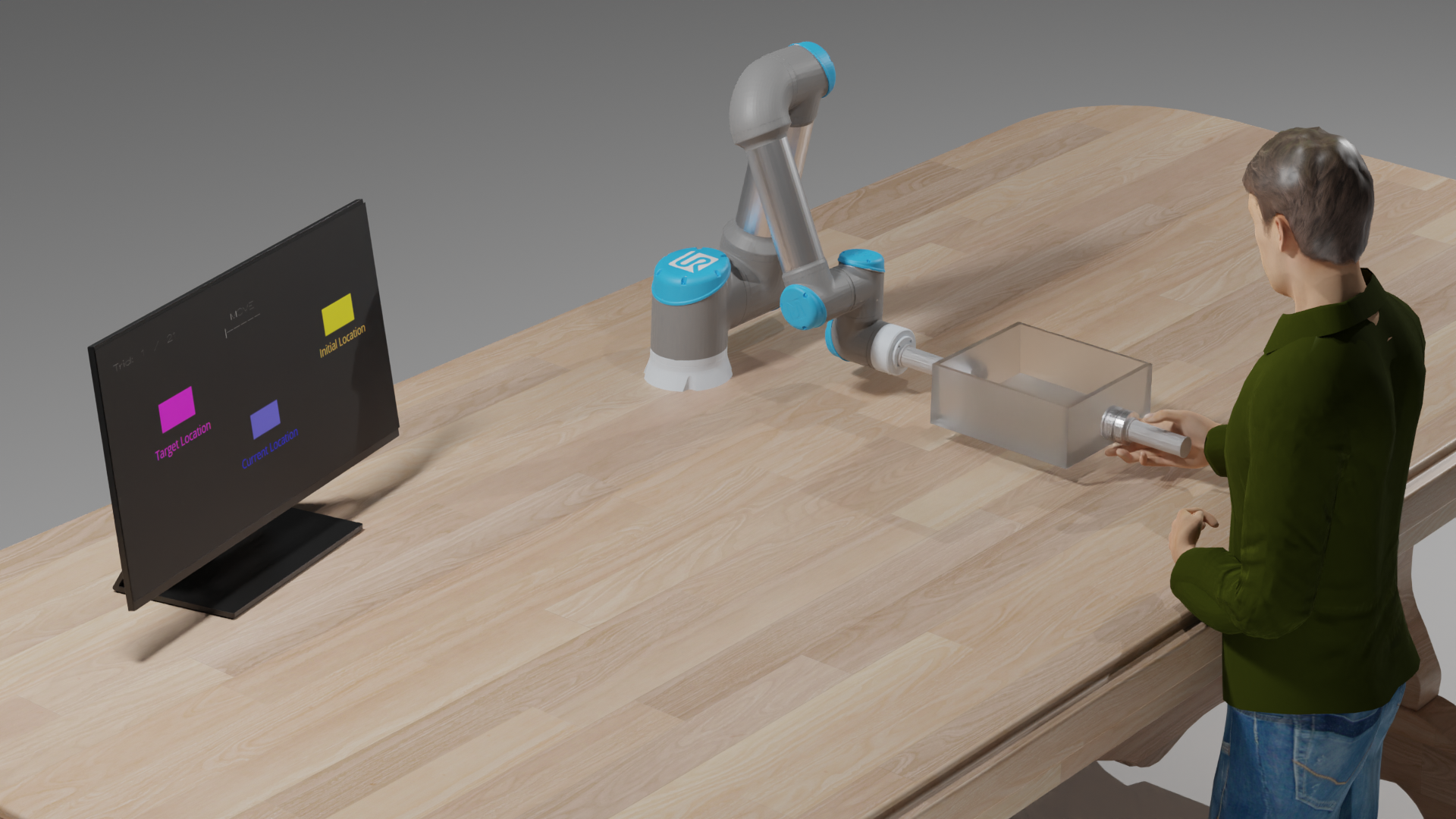
As artificial intelligence techniques become more sophisticated, we anticipate that robots collaborating with humans will develop their own intentions, leading to potential conflicts in interaction.
This development calls for advanced conflict resolution strategies in physical human-robot interaction (pHRI), a key focus of our research.
We use a Machine Learning (ML) classifier to detect conflicts during co-manipulation tasks to adapt the behavior of the robot accordingly using an admittance controller.
Fast Calculation of Robust Stabilizing PID Controllers for SISO systems
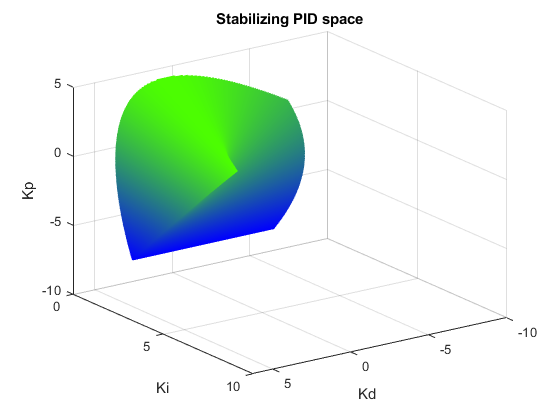
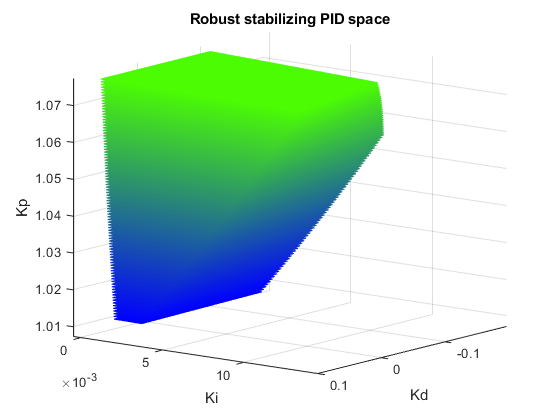
A fast method for the computation of PID gains for stabilizing a closed system is proposed.
It is shown, in particular, that for a fixed value of the proportional term, the resulting PID compensators form a finite set of disjoint polyhedral sets in the parameter space.
A complete characterization of this space and a practical way of determining the stabilizing gains in this space are given.
The proposed method has several advantages over standard PID tuning approaches and is promising for real-time and/or robust control applications..
For a detailed overview, check the documentation: Project Documentation (PDF).
Robust Control of TITO Systems Under Multiplicative Uncertainty and a Case Study: Longitudinal Control of a Fixed-Wing Aircraft
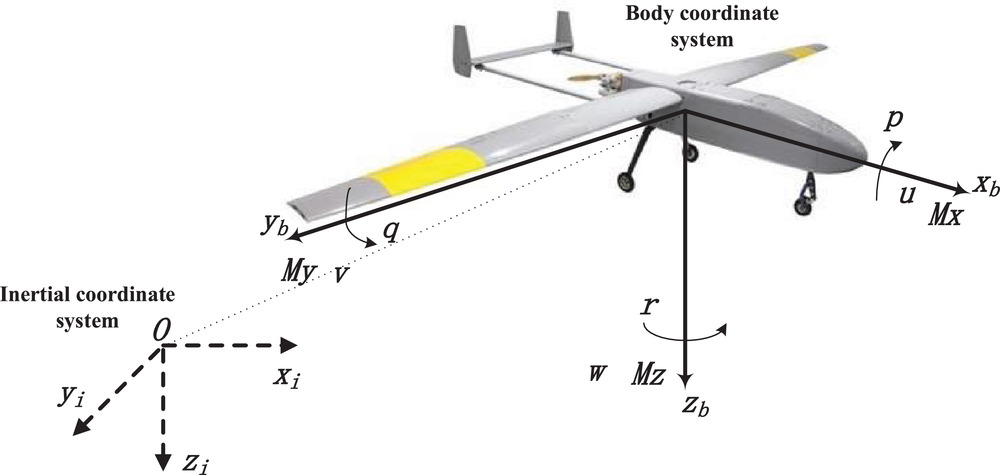
This comprehensive study began with theoretical analyses of SISO systems using the frameworks of Nyquist theorem and multiplicative uncertainty, progressively extended to TITO configurations.
A pivotal segment of the research was dedicated to the control mechanisms of fixed-wing aircraft, focusing on achieving a balanced longitudinal axis for steady level flight—a critical aspect for maintaining desired altitudes and speeds.
To explore more the methodologies and findings, you're invited to review the comprehensive documentation: Project Documentation (PDF).
For additional resources and data, visit our Google Drive: Google Drive Folder.
Education
Koç University
Master of Science in Mechanical Engineering (2022 – Present)
Specializing in Robotics and Mechatronics, focusing on projects physical human-robot interaction (pHRI) under the supervision of Prof. Cagatay Basdogan.
Awarded the Koç University - Is Bankasi Artificial Intelligence Center Fellowship.

Istanbul Technical University
Bachelor of Science in Control and Automation Engineering (2017 – 2022)
Graduated as valedictorian with a GPA of 3.87/4.00.
Thesis on "Robust Control of TITO Systems Under Multiplicative Uncertainty and a Case Study: Longitudinal Control of a Fixed-Wing Aircraft" under Doç. Dr. İlker Üstoğlu.
Contact
Elements
Text
This is bold and this is strong. This is italic and this is emphasized.
This is superscript text and this is subscript text.
This is underlined and this is code: for (;;) { ... }. Finally, this is a link.
Heading Level 2
Heading Level 3
Heading Level 4
Heading Level 5
Heading Level 6
Blockquote
Fringilla nisl. Donec accumsan interdum nisi, quis tincidunt felis sagittis eget tempus euismod. Vestibulum ante ipsum primis in faucibus vestibulum. Blandit adipiscing eu felis iaculis volutpat ac adipiscing accumsan faucibus. Vestibulum ante ipsum primis in faucibus lorem ipsum dolor sit amet nullam adipiscing eu felis.
Preformatted
i = 0;
while (!deck.isInOrder()) {
print 'Iteration ' + i;
deck.shuffle();
i++;
}
print 'It took ' + i + ' iterations to sort the deck.';
Lists
Unordered
- Dolor pulvinar etiam.
- Sagittis adipiscing.
- Felis enim feugiat.
Alternate
- Dolor pulvinar etiam.
- Sagittis adipiscing.
- Felis enim feugiat.
Ordered
- Dolor pulvinar etiam.
- Etiam vel felis viverra.
- Felis enim feugiat.
- Dolor pulvinar etiam.
- Etiam vel felis lorem.
- Felis enim et feugiat.
Icons
Actions
Table
Default
| Name |
Description |
Price |
| Item One |
Ante turpis integer aliquet porttitor. |
29.99 |
| Item Two |
Vis ac commodo adipiscing arcu aliquet. |
19.99 |
| Item Three |
Morbi faucibus arcu accumsan lorem. |
29.99 |
| Item Four |
Vitae integer tempus condimentum. |
19.99 |
| Item Five |
Ante turpis integer aliquet porttitor. |
29.99 |
|
100.00 |
Alternate
| Name |
Description |
Price |
| Item One |
Ante turpis integer aliquet porttitor. |
29.99 |
| Item Two |
Vis ac commodo adipiscing arcu aliquet. |
19.99 |
| Item Three |
Morbi faucibus arcu accumsan lorem. |
29.99 |
| Item Four |
Vitae integer tempus condimentum. |
19.99 |
| Item Five |
Ante turpis integer aliquet porttitor. |
29.99 |
|
100.00 |
